|
Zhen Zhang I'm currently a first-year Ph.D. student at Department of Mechanical and Automation Engineering, CUHK, under the supervision of Prof. Kwok Wai Samuel Au. Before that, I was a research assistant at the MRC-CUHK. I received my M.S. degree with Dean's List from Electronic Engineering, CUHK. Previously, I obtained my B.Eng. degree with honours in 2021 from NWPU, Xi'an, China. I was one of ten recipients of the Chiang Chen Overseas Fellowship (Mainland China), 2022. I'm interested in robotics, robot manipualtion and deep learning. My previous research is about 3D volumetric deformable object manipualtion, quadruped robot. - [Email] | [linkedin] | [Google Scholar] | [Github] - |

|
News |
|
Research |
2025 |
|
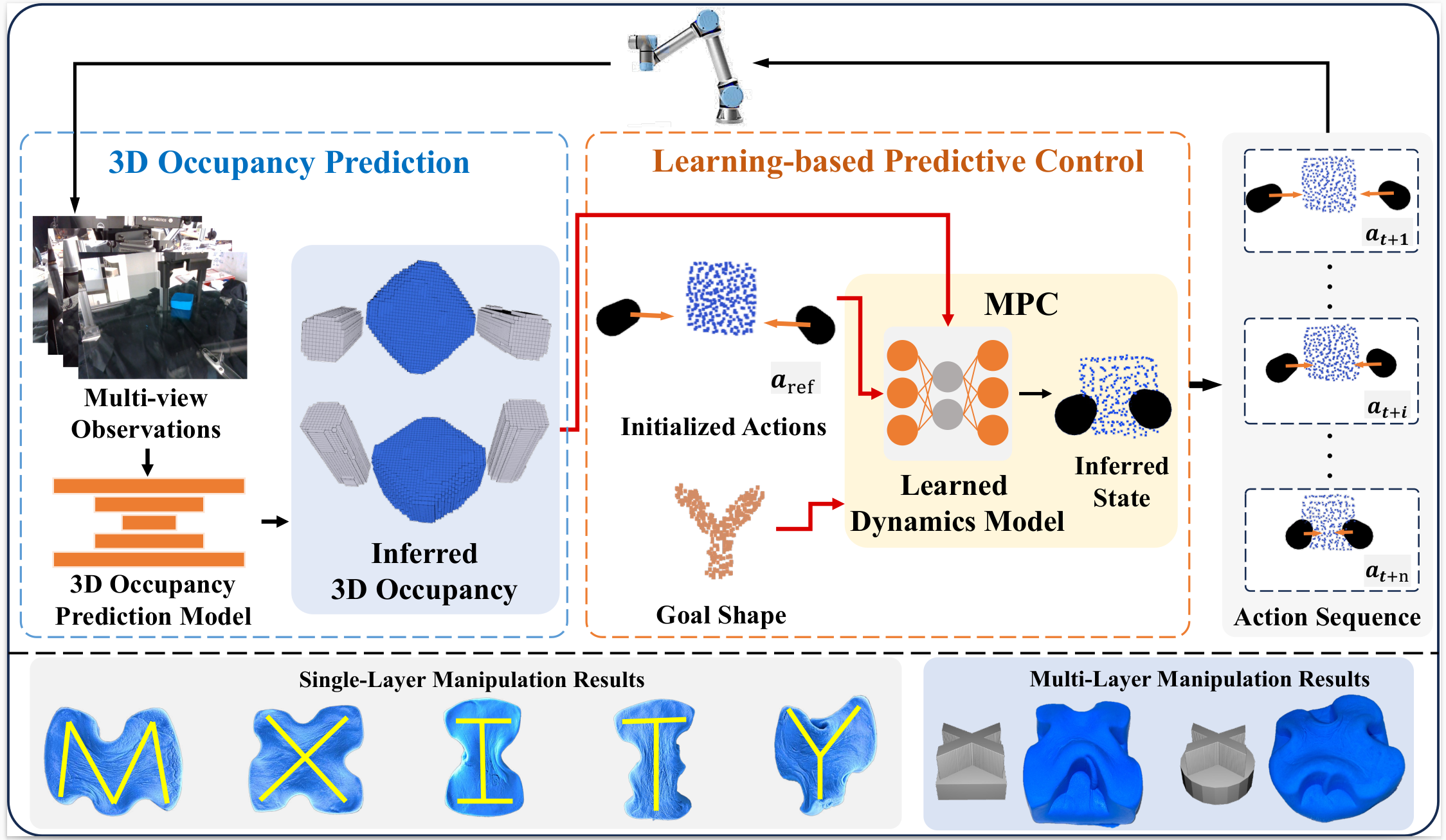
Manipulating Elasto-Plastic Objects With 3D Occupancy and Learning-Based Predictive Control
Zhen Zhang, Xiangyu Chu, Yunxi Tang, Lulu Zhao, Jing Huang, Zhongliang Jiang, K. W. Samuel Au IEEE Robotics and Automation Letters IEEE / Bibtex This work proposes a novel framework for elasto-plastic object manipulation, leveraging 3D occupancy to represent such objects, a learned dynamics model trained with 3D occupancy, and a learning-based predictive control algorithm. |
2024 |
|
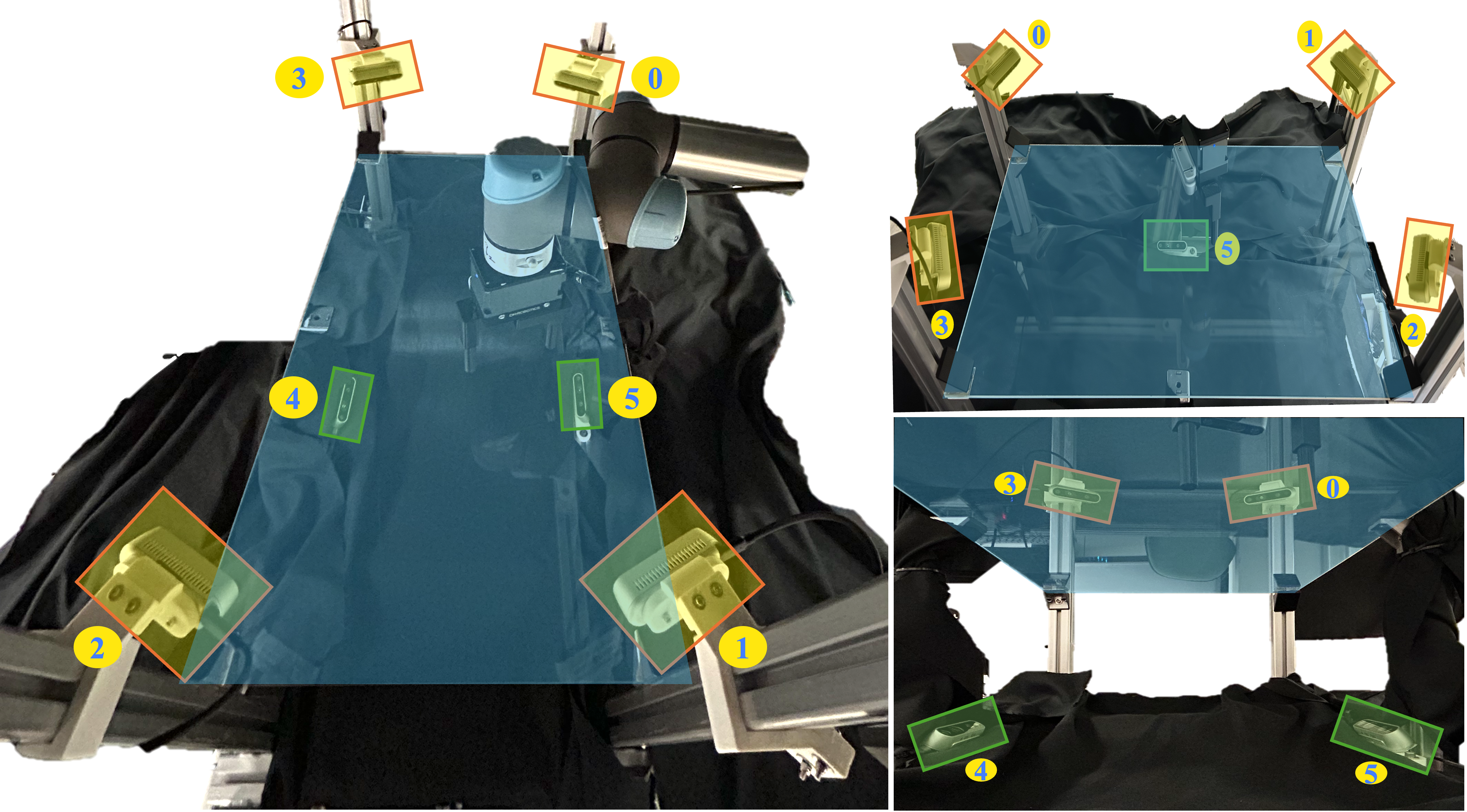
DOFS: A Real-world 3D Deformable Object Dataset with Full Spatial Information for Dynamics Model Learning
Zhen Zhang, Xiangyu Chu, Yunxi Tang, K. W. Samuel Au CoRL Workshop on Learning Robot Fine and Dexterous Manipulation: Perception and Control, 2024 Project page / arXiv / Bibtex Proposing a pilot dataset of 3D deformable objects (e.g., elasto-plastic objects) with full spatial information (i.e., top, side, and bottom information) using a novel and low-cost data collection platform with a transparent operating plane. |
|
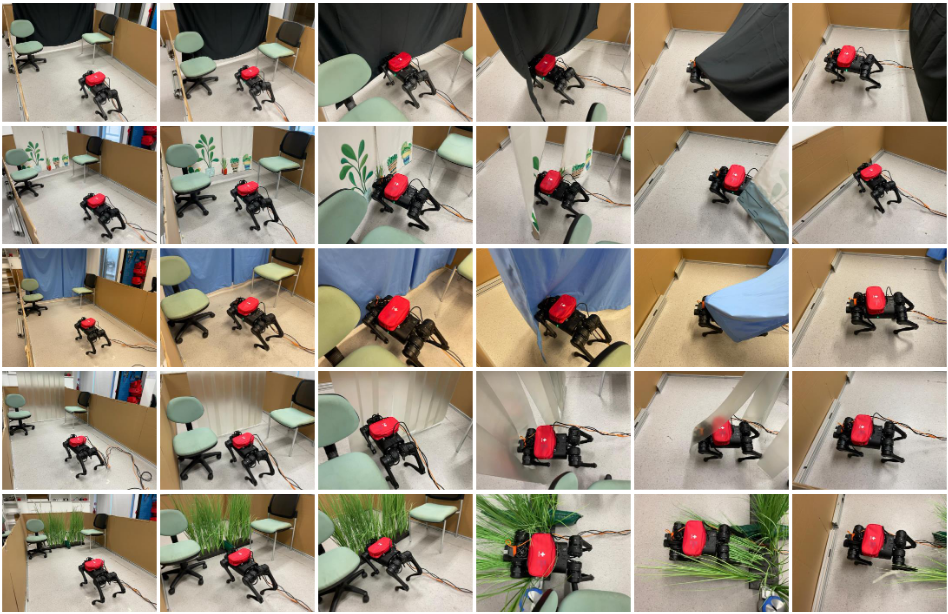
Interactive Navigation in Environments with Traversable Obstacles Using
Large Language and Vision-Language Models
Zhen Zhang, Anran Lin, Chun Wai Wong, Xiangyu Chu, Qi Dou, K. W. Samuel Au IEEE International Conference on Robotics and Automation (ICRA), 2024 IEEE / Bibtex Proposing an interactive navigation framework by using large language and vision-language models, allowing robots to navigate in environments with traversable obstacles (e.g., curtain). |
Miscellanea |
Teaching |
|
Services |
|
Life |
|
|
Thanks so much for the source code from Jon Barron . |